
BUILDING AUTOMATION CON PROTOCOLLO KNX – CARATTERISTICHE TECNICHE
Per integrare il sistema di gestione automatizzata di un edificio è opportuno adottare un sistema che elimini il problema delle soluzioni “isola”, assicurando che tutti i componenti comunichino per mezzo di un linguaggio comune, a tal fine ci si è orientati verso una soluzione utilizzando il bus KNX, indipendente dal singolo costruttore e dalla particolare applicazione. Mediante il mezzo trasmissivo KNX al quale sono collegati tutti i dispositivi bus (doppino intrecciato, radio frequenza, onda convogliata o IP/Ethernet), essi sono in grado di scambiarsi informazioni. I dispositivi bus possono essere sensori od attuatori richiesti per il controllo di apparecchiature di gestione degli edifici come: illuminazione, veneziane / tapparelle, sistemi di sicurezza, gestione dell’energia, riscaldamento, sistemi di ventilazione e climatizzazione, sistemi di segnalazione e monitoraggio, interfacce verso sistemi di monitoraggio e di manutenzione per l’edificio, controllo remoto, contabilizzazione, controllo audio / video, elettrodomestici, ecc. Tutte queste funzioni possono essere controllate, monitorate e segnalate mediante un unico sistema, senza necessità di centrali di controllo aggiuntive, con la possibilità di essere interfacciate con un sistema generale di supervisione e tramite Web Browser. Lo standard KNX è basato sulla consolidata tecnologia EIB ed integra le modalità di configurazione ed i mezzi trasmissivi di Batibus ed EHS.
Caratteristiche generali Standard KNX e tecnologia
La rete di comunicazione dovrà essere basata sullo standard KNX che, per quanto riguarda il protocollo di comunicazione (7 livelli ISO/OSI) è rispondente alla norma EN 50090. Dovrà essere ad intelligenza distribuita, pilotato da eventi e con trasmissione dati seriale per le funzioni operative di comando, attuazione, controllo, monitoraggio e segnalazione. Tramite una linea di trasmissione comune (il bus), tutti gli apparecchi bus collegati dovranno scambiarsi informazioni; la trasmissione dati dovrà avvenire in modo seriale secondo regole stabilite: il protocollo di trasmissione bus. Le informazioni da trasmettere dovranno essere organizzate in “telegrammi” ed inviate sulla linea bus da un apparecchio (il “mittente”) ad uno o più apparecchi (il/i “destinatario/i”). Ogni destinatario conferma la ricezione del telegramma; se ciò non avviene l’invio del telegramma può essere ripetuto (fino a tre volte). Se la ricezione del telegramma non viene confermata, la procedura di invio viene interrotta e l’errore viene registrato nella memoria del trasmettitore. I telegrammi vengono modulati su tensione continua; uno “zero logico” viene trasmesso come impulso, mentre l’assenza di impulsi viene interpretata come un “uno logico”.
Struttura del sistema e cablaggio
All’interno di una rete EIB/KNX possiamo distinguere vari dispositivi raggruppati in linee, a loro volta appartenenti ad una delle “Zone” o “Aree” che costituiscono il sistema completo. La linea che li unisce tutti è il bus, costituito da un doppino utilizzato sia per la trasmissione dei segnali sia per l’alimentazione dei dispositivi. Ogni linea può raggruppare fino a 64 dispositivi, ogni area fino a 15 linee e ogni sistema può comprendere fino a 15 aree distinte. In ogni singolo sistema EIB/KNX è perciò possibile connettere oltre 14.400 dispositivi diversi. Le linee vengono collegate alle linee principali mediante degli accoppiatori di linea (AL); più linee principali possono poi essere accoppiate fra loro usando una linea dorsale e gli accoppiatori di area (AA). Quello che è importante rimarcare è che i singoli dispositivi possono essere connessi in qualunque punto del cavo bus, su qualsiasi livello di collegamento, cioè su qualsiasi tipo di linea.
 Ciascun tipo di linea (anche principale o dorsale), che definisce una sezione del sistema, può avere la distribuzione che si preferisce (lineare, a stella, ad albero o una loro qualsiasi combinazione) purché si rispettino i seguenti standard KNX per garantire il perfetto funzionamento del sistema:
Ciascun tipo di linea (anche principale o dorsale), che definisce una sezione del sistema, può avere la distribuzione che si preferisce (lineare, a stella, ad albero o una loro qualsiasi combinazione) purché si rispettino i seguenti standard KNX per garantire il perfetto funzionamento del sistema:
- lunghezza massima di una singola linea 1000 metri
- numero massimo di dispositivi sulla singola linea 64
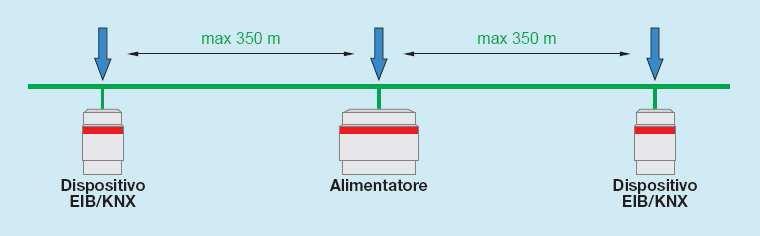
- distanza massima fra 2 dispositivi 700 metri
- distanza massima di un dispositivo dall’alimentazione 350 metri
- numero massimo di alimentatori per linea: 2 (posti almeno 200 metri l’uno dall’altro).


Tipologia di dispositivi
I dispositivi EIB/KNX si suddividono in dispositivi di sistema e dispositivi dedicati all’applicazione. I dispositivi di sistema supportano e svolgono tutte le operazioni base. Appartengono a questa categoria, ad esempio, i dispositivi accoppiatori e l’alimentatore che alimenta a bassissima tensione di sicurezza (SELV 24 Vc.c.) i diversi dispositivi collegati al sistema. I dispositivi dedicati all’applicazione sono tutti quelli che consentono il controllo dell’edificio. Appartengono a questa categoria gli interruttori, i relè attuatori, i sensori (di luminosità, di temperatura, ecc.), gli apparati di segnalazione e così via. In generale i dispositivi sono strutturalmente divisi in due moduli:
- il modulo applicativo vero e proprio (ad esempio interruttore e relativo tasto)
- l’accoppiatore BCU (Bus Coupling Unit) che realizza la connessione al bus.
L’accoppiatore BCU, che consente l’interscambio dei segnali tra il modulo applicativo e il resto del sistema, può essere già contenuto nel dispositivo stesso oppure può essere facilmente abbinato ad esso. Le stesse funzionalità sono spesso disponibili in dispositivi di forma diversa (per il montaggio a incasso a parete o su profilato DIN) per agevolare le diverse esigenze di installazione. Sono anche presenti dispositivi che permettono l’interfacciamento, intesi come terminali di ingresso e di uscita, che consentono al sistema l’inclusione di apparecchi differenti.
Telegrammi
Lo scambio di informazioni tra i dispositivi avviene mediante telegrammi, che trasmettono le informazioni necessarie codificate sotto forma di bit. Ogni volta che si aziona un interruttore oppure viene eccitato un sensore di allarme o più, semplicemente, se un dispositivo del sistema ha delle informazioni da trasmettere viene immesso un telegramma sul bus. Il telegramma è costituito da più campi, ciascuno dei quali contiene una ben precisa informazione. I campi che lo costituiscono sono:
- Campo di controllo: Contiene delle informazioni che indicano la tipologia del messaggio e la priorità del telegramma.
- Indirizzi di partenza: Contiene l’indirizzo fisico del dispositivo domotico che si occupa di instradare il telegramma.
- Indirizzo di destinazione: Contiene un indirizzo di gruppo ma, in alcuni casi, cioè durante operazioni di programmazione o diagnostica, può contenere anche un indirizzo fisico.
- Lunghezza: Indica la dimensione del campo dati del telegramma (0-15 byte); la lunghezza massima di un telegramma è pari a 23 byte.
- Routing Counter: Indica il numero di salti che il telegramma è autorizzato a compiere prima di raggiungere la destinazione.
- Dati: Contiene le informazioni che il dispositivo iniziale decide di inviare ad un altro indirizzo.
- Byte di Controllo: Si tratta di un byte che permette di verificare se i dati contenuti negli altri campi sono arrivati correttamente. Contiene il calcolo della parità dispari basata sugli altri ottetti del telegramma.
 La certezza di funzionamento delle comunicazioni e dell’arrivo dei vari telegrammi impacchettati è stabilita dallo standard EIB/KNX, che attraverso un protocollo di checksum garantisce ad i vari dispositivi l’invio e la ricezione del pacchetto, infatti:
La certezza di funzionamento delle comunicazioni e dell’arrivo dei vari telegrammi impacchettati è stabilita dallo standard EIB/KNX, che attraverso un protocollo di checksum garantisce ad i vari dispositivi l’invio e la ricezione del pacchetto, infatti:
- Se un dispositivo rivela qualche errore nel telegramma ricevuto invia al dispositivo mittente l’informazione di non corretta ricezione, causando la ritrasmissione del telegramma fino a un massimo di tre volte;
- Se il dispositivo mittente non riceve la conferma di corretta ricezione entro un determinato intervallo di tempo, interpreta l’accaduto come “telegramma non ricevuto dal destinatario” e lo ritrasmette automaticamente;
- Se il destinatario non è in grado di ricevere immediatamente il telegramma, invia un messaggio di “occupato”, facendo si che il dispositivo mittente ritrasmetta le informazioni dopo un periodo d’attesa;
- In caso di rilevazioni di errore o altri messaggi urgenti il sistema permette di assegnare una priorità di trasmissione ai relativi telegrammi. I telegrammi di allarme hanno priorità maggiore rispetto ai dati normali.
Sono previsti complessivamente quattro livelli di priorità dei messaggi in ordine crescente:
- Low Operation, per comandi con priorità normale
- High Operational per comandi rapidi
- Allarm per allarmi
- System per la gestione della rete
Indirizzamento e scenari
A ogni dispositivo corrisponde un indirizzo “fisico” univoco in tutto il sistema, che identifica l’area (linea principale), la linea e il dispositivo stesso al’interno della linea. Prima si era parlato di telegrammi inviati dai dispositivi ed avevamo menzionato il campo “Indirizzo di partenza” che fa proprio riferimento all’indirizzo fisico del dispositivo chiamante. Quindi l’indirizzo fisico rappresenta identificazione univoca per ciascun elemento presente ed interfacciato al bus.L’indirizzo fisico ha l’aspetto di “1.1.1” dove il primo numero rappresenta l’area, il secondo la linea, il terzo il dispositivo. Gli indirizzi di destinazione dei telegrammi al contrario di quelli di partenza, contengono sempre indirizzi di gruppo. L’indirizzo di gruppo può essere definito come un indirizzo comune a due o più dispositivi intercorrelati da una medesima logica funzionale, infatti possiamo dire che l’indirizzo di gruppo realizza quindi un cablaggio logico tra i diversi dispositivi. Gli indirizzi di gruppo a differenza di quelli fisici vengono indicati come “1/1/1” dove il concetto di Area, Linea e Campo vien sostituita da quella di Main Group, Middle Group, Little Group, da notare inoltre la sostituzione da “.” a “/”. Un esempio chiarificatore per questo concetto può essere, se un interruttore deve accendere più lampade, nella logica di sistema sia l’interruttore sia gli attuatori di accensione delle lampade vengono identificati con il medesimo indirizzo di gruppo. Modificando via software gli indirizzi di gruppo si possono quindi modificare le funzioni degli impianti, cambiando gli abbinamenti tra dispositivi di comando (interruttori, ecc.) e utenze comandate (lampade, ecc.), senza dover apportare alcuna modifica ai cablaggi dell’impianto interessato. Attraverso gli indirizzamenti di gruppo possono essere stabilite correlazioni funzionali anche molto complesse tra i dispositivi che operano in un sistema EIB/KNX. Infatti uno stesso dispositivo, ad esempio una lampada, può essere contenuta all’interno di diversi indirizzi di gruppo, questo fa si che ogni elemento della casa sia un elemento flessibile, che possa entrare a far parte di differenti scenari senza sconvolgere inutilmente la struttura dell’impianto. Associando un dispositivo a due indirizzi di gruppo differenti, è possibile fargli svolgere due funzioni differenti, ad esempio una lampada associata allo scenario film apparterrà ad un determinato indirizzo di gruppo a cui saranno associati alcuni comandi (es. luce dimmerizzata 20%) , potrà essere tranquillamente associata ad un altro indirizzo di gruppo, e quindi un altro scenario ipoteticamente, a cui faranno capo poi comandi differenti. La creazione degli scenari dipende essenzialmente dalla creazione di indirizzi di gruppo a cui associare comandi e logiche di comportamento del tutto personalizzabili, senza stravolgere la struttura del nostro impianto.
Mezzi trasmissivi
Lo standard KNX prevede diversi mezzi trasmissivi, ogni mezzo trasmissivo può essere utilizzato in combinazione con uno o più modi di configurazione, in modo da permettere ad ogni costruttore di scegliere la combinazione ideale per il segmento e l’applicazione nel mercato obiettivo.
TP (Twisted Pair) TP-1 Questo mezzo di comunicazione (cavo bus twistato con velocità pari a 9600 bit/s) proviene da EIB. I prodotti certificati EIB e KNX TP1 funzionano e comunicano tra loro sulla stessa linea bus.
PL (Powerline) PL110 Questo mezzo di comunicazione (rete di alimentazione elettrica con velocità pari a 1200 bit/s) proviene da EIB. Prodotti certificati EIB e KNX PL110 funzionano e comunicano fra loro sulla stessa rete di distribuzione elettrica.
RF (Radio Frequency) I dispositivi KNX che supportano questo mezzo di comunicazione usano segnali in radiofrequenza per trasmettere telegrammi KNX. I telegrammi sono trasmessi nella banda di frequenza a 868 MHz (Short Range Devices), con una potenza massima irradiata di 25 mW ed una velocità di 16.384 kbit/sec. Il mezzo KNX RF può essere sviluppato con componenti standard, consente implementazioni uni e bidirezionali, è caratterizzato da un basso consumo di energia e negli impianti piccoli e medi richiede l’impiego di ripetitori solo in casi eccezionali.
IP (Ethernet) Come documentato nelle specifiche KNXnet/IP, i telegrammi KNX possono essere trasmessi anche incapsulati in telegrammi IP. In questo modo, le reti LAN ed Internet possono essere usate per il routing od il tunneling di telegrammi KNX. I router IP rappresentano così un’alternativa alle interfacce dati USB per linee TP od agli accoppiatori di linea o di dorsale (backbone). Nell’ultimo caso, la consueta dorsale TP è sostituita da una linea basata su fast Ethernet.
Interworking
L’interworking è la maggiore risorsa della tecnologia KNX ed è definito come “la situazione nella quale i prodotti che inviano e ricevono i messaggi possono comprendere correttamente i segnali ed elaborarli senza apparecchiature aggiuntive” . Per trarre pieno vantaggio dall’impiego di un sistema di controllo per le case e gli edifici, è indispensabile che i prodotti di differenti costruttori (“multivendor interworking”) ed i prodotti di differenti campi applicativi (“cross-discipline interworking”) possano lavorare insieme.
Le regole principali di interworking KNX per i prodotti certificati KNX sono di seguito riportate:
- I prodotti etichettati con il marchio KNX, devono “parlare e comprendere” il linguaggio KNX, devono quindi interpretare correttamente i segnali analogici sul mezzo al quale sono collegati e i bit ed i byte come previsto nelle specifiche di sistema KNX;
- I prodotti certificati KNX devono essere configurabili con un tool di ingegnerizzazione (ETS™) indipendente dal singolo costruttore o, perlomeno, le risorse di rete utilizzate dai dispositivi possono essere rilevate da questo tool;
- La realizzazione di una specifica funzione – ad esempio l’invio di una temperatura durante il normale funzionamento – può essere codificata soltanto in accordo alle specifiche di interworking KNX. Per un gruppo di funzioni (comando, dimmerizzazione, controllo tapparelle, valori interi e flottanti, percentuali, data/ora, modi HVAC, controllo scenari, …), KNX ha standardizzato un insieme completo di data types .
Configurazione
Per configurare un’installazione EIB/KNX occorre un lavoro complesso che non può essere effettuato semplicemente tramite collegamento di opportuni fili in alloggiamenti specifici. Una volta collegati tra loro gli apparati tramite bus (qualunque sia la loro topologia) ed effettuati i collegamenti elettrici per il controllo delle utenze, occorre permettere la comunicazione vera e propria tra i dispositivi non solo a livello elettrico ma anche ad alto livello, operando un’opportuna e alquanto complessa configurazione. Tramite un apposito software denominato Eib Tool Software (ETS) che fornisce compatibilità con tutti i dispositivi EIB, e che viene installato su un personal computer che a sua volta deve essere collegato al bus nel modo che si ritiene più utile e comodo, sia esso RS232, USB o IP. E’ possibile operare la configurazione dell’intera installazione anche senza il collegamento, in quanto tutto il lavoro viene fatto offline; la connessione al bus è necessaria solamente quando si desidera effettuare il download su rete di quanto fino al momento configurato. Il download può coinvolgere uno o più dispositivi e può riguardare l’intero software o solamente alcuni parametri di un device. Il collegamento col bus avviene come detto tramite un’interfaccia scelta dall’installatore ed utilizza librerie particolari denominate Falcon, che consentono la comunicazione tra il bus ed applicativi presenti sul personal computer in uso, vincolando l’uso del sistema operativo Windows. Sono presenti nell’ambito opensource tools software che cercano di permettere la comunicazione col bus domotico non solo tramite l’utilizzo del software ETS e delle librerie Falcon: in particolare si segnala il Linux Eib Home Server, il quale utilizza un’interfaccia RS232 per il collegamento ad una installazione EIB, oppure le librerie di comunica Calimero per l’interfaccia di programmazione Basys.